Çin’e ait bir ticari uydu, gelecekteki yörüngede servis operasyonlarını desteklemek üzere tasarlanan esnek bir robotik kolun teslerini başarıyla tamamladı. Bu gelişme, otonom uzay aracı bakım teknolojileri açısından ileriye doğru atılmış önemli bir adım.
Xiyuan-0 uydusu olarak da bilinen Yuxing-3 06 uydusu, 16 Mart 2026 tarihinde Jiuquan Uydu Fırlatma Merkezi’nden Kuaizhou-11 Y7 roketiyle fırlatıldı ve belirlenen yörüngesine yerleşti. Bu görev, Suzhou Sanyuan Aerospace Technology Co., Ltd. ve ortakları tarafından geliştirilen esnek bir robotik kolun ilk yörüngedeki operasyon testi olma özelliğini taşıyor.
Uydunun ana yükü olan sürekli esnek yapıya sahip robot kol, Sanyuan Aerospace ve Tsinghua University Shenzhen International Graduate School tarafından ortaklaşa geliştirildi. Uydu platformu ise Shenzhen Mofang Satellite Technology Co., Ltd. tarafından sağlandı. Mühendisler, yörünge görevi boyunca gelecekteki yakıt ikmali ve servis işlemleri için kritik teknolojileri doğrulamak amacıyla robotik kolu çeşitli zorlu görevlerde test etti. Testler; programlı simülasyon yakıt ikmali, uzaktan kontrol ile simülasyon yakıt ikmali, görsel servo tabanlı kenetlenme ve kuvvet uyumlu manipülasyon gibi aşamaları kapsadı.
Dört Mod, Gerçek Doğrulama
İlk test modu olan programlı simülasyon yakıt ikmalinde, robotik kol hareket rotasını otonom olarak planladı ve yürüttü. Sistem, yer müdahalesi olmadan güvenli bir konumdan kenetlenme konumuna geçti ve geri döndü. Bu simülasyon, araç üzerindeki otonom planlamanın güvenilirliğini ve hassasiyetini kanıtladı.
İkinci mod olan uzaktan kontrol ile simülasyon yakıt ikmalinde, yerdeki operatörler bir el kumandası ve birinci şahıs görüşlü kamera geri bildirimi kullanarak kolu gerçek zamanlı olarak yönlendirdi. Bu yöntem, uzay ve yer arasında insanın döngüde olduğu kontrol sürecini göstererek iş birliği yapmayan hedeflerle çalışmaya yönelik önemli deneyim sağladı.
Üçüncü mod olan görsel servo tabanlı kenetlenme, bir görsel servo sisteminden güç alıyor. Yer sistemleri, birinci şahıs kamerası görüntülerini kullanarak kolun uç kısmının konumunu gerçek zamanlı olarak tanımladı, hareket planı oluşturdu ve kontrol komutlarını üretti. Bu süreç, yer ve uzay sistemleri arasındaki görüntü tabanlı kapalı döngü kontrolünü doğruladı.
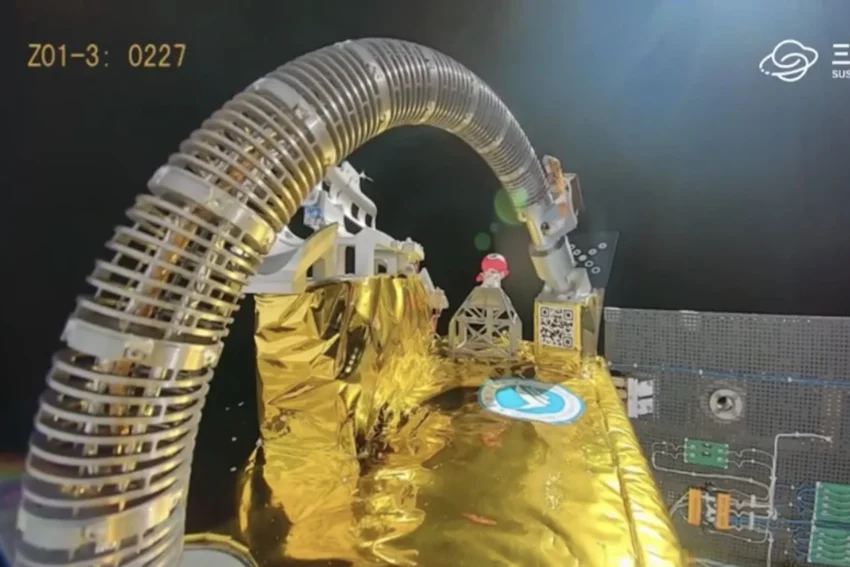
Dördüncü mod olan kuvvet uyumlu manipülasyon aşamasında, kuvvet geri bildirimi ve uyumlu kontrol kabiliyetleri test edildi. Robotik kol, gerçek zamanlı kuvvet sensörü verilerine dayanarak bir kenetlenme fişini otonom olarak yönlendirirdi ve bir pano üzerine daire, üçgen ve düz çizgiler çizdi. Bu test, uç efektörün kuvvet kontrol hassasiyetini ve uyumlu kontrol yeteneğini doğrulayarak yörüngede montaj ve bileşen değişimi gibi hassas operasyonlar için kritik bir altyapı sağladı.
Esnek robot kolu tasarımı, “esnek, içi boş yapıdaki kol + arka konumlu kablo tahrik sistemi” mimarisine dayanıyor; bu yapı hafiflik, yüksek esneklik ve yüksek güvenilirliği bir arada sunuyor. Esnek yapı, uyumlu yakıt hatlarıyla çalışabilecek şekilde tasarlanarak gelecekteki yörüngede yakıt ikmali operasyonlarında daha güvenli kenetlenme imkânı sağlıyor.
Sanyuan Aerospac, kablolu tahrik sisteminin kontrol bileşenlerini uydu gövdesinin içine yerleştirdiğini, bunun termal kontrol ve radyasyon korumasını basitleştirerek Ar-Ge maliyetlerini düşürdüğünü vurguladı. Ayrıca modüler tasarım, küçük uyduların zorlu kullanım şartlarına uyum sağlıyor.
Ekip ayrıca, küresel yer istasyonu ağı sayesinde güneş eşzamanlı yörüngeyle sürekli bağlantı kurulabildiğini ve uzay-yer iş birliğinin etkin şekilde sağlandığını vurguladı. Sistem, her geçişte 20 dakikaya kadar telemetri ve kontrol imkânı sunarken alt saniye seviyesinde geri besleme gecikmesiyle gerçek zamanlı koordinasyon sağladı.
Şirket tarafından yapılan açıklamada, “Uydu, esnek robotik kolunun tüm yörünge operasyonlarını başarıyla tamamlayarak Çin’in ticari uzay endüstrisi için yörüngedeki servisler alanında ileriye doğru sağlam bir adım attı.” ifadesine yer verildi.
Bu görev, ticari uzay aracı servis teknolojileri açısından önemli bir ilerleme.
Kaynak: http://interestingengineering.com/ai-robotics/china-flexible-space-robotic-arm



